







新闻中心 
迈向『闭环』| PlanAgent:基于MLLM的自动驾驶闭环规划新SOTA!
 2024-06-05
2024-06-05 浏览次数:次
浏览次数:次 返回列表
返回列表中科院自动化所深度强化学习团队联合理想汽车等提出了一种新的基于多模态大语言模型MLLM的自动驾驶闭环规划框架—PlanAgent。该方法以场景的鸟瞰图和基于图的文本提示为输入,利用多模态大语言模型的多模态理解和常识推理能力,进行从场景理解到横向和纵向运动指令生成的层次化推理,并进一步产生规划器所需的指令。在大规模且具有挑战性的nuPlan基准上对该方法进行了测试,实验表明PlanAgent在常规场景和长尾场景上都取得了最好(SOTA)性能。与常规大语言模型(LLM)方法相比,PlanAgent所需的场景描述词符(token)量仅为1/3左右。
论文信息
 Yaara
Yaara
使用AI生成一流的文案广告,电子邮件,网站,列表,博客,故事和更多…
 95
查看详情
95
查看详情

- 论文题目:PlanAgent: A Multi-modal Large Language Agent for Closed loop Vehicle Motion Planning
- 论文发表单位:中科院自动化所,理想汽车,清华大学,北京航空航天大学
- 论文地址:https://arxiv.org/abs/2406.01587
☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜
1 引言
作为自动驾驶的核心模块之一,运动规划的目标是产生一条安全舒适的最优轨迹。基于规则的算法,如PDM[1]算法,在处理常见场景时表现良好,但往往难以应对需求更复杂驾驶操作的长尾场景[2]。基于学习的算法[2,3]常常会在长尾情况下过拟合,导致其中在nuPlan中的性能并不如基于规则的方法PDM。
最近,大语言模型的发展为自动驾驶规划开辟了新的可能性。最新的一些研究尝试利用大语言模型强大的推理能力增强自动驾驶算法的规划和控制能力。然而,它们遇到了一些问题:(1)实验环境未能基于真实关闭环境场景(2)使用数量的坐标数字表示地图细节或运动状态,大大增加了所需的词符(token)数量;(3)由大语言模型直接生成轨迹点难以确保安全。为应对上述挑战,本文提出了PlanAgent方法。
2 方法
基于MLLM的闭环规划智能体PlanAgent框架如图1所示,本文设计了三个模块来解决自动驾驶中的复杂问题:
- 场景信息提取模块(Environment Transformation module):为了实现高效的场景信息表示,设计了一个环境信息提取模块,能够提取具有车道信息的多模态输入。
- 推理模块(Reasoning module):为了实现场景理解和常识推理,设计了一个推理模块,该模块利用多模态大语言模型MLLM生成合理且安全的规划器代码。
- 反思模块(Reflection module):为了保障安全规划,设计了一个反思机制,能够通过*对规划器进行验证,过滤掉不合理的MLLM提案。
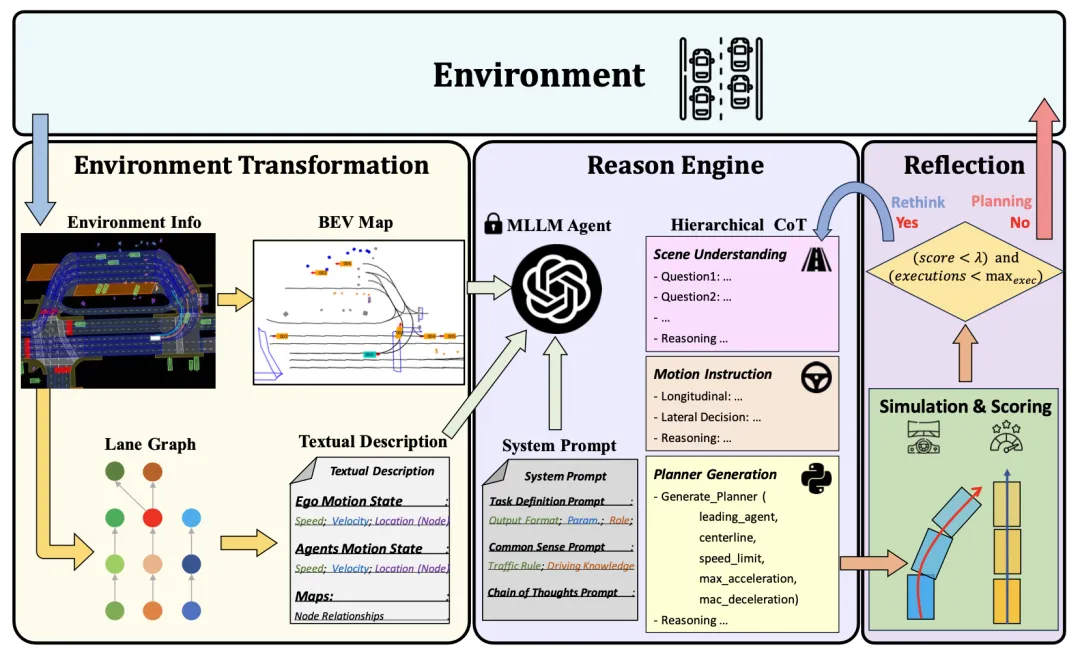
图1 PlanAgent的整体框架,包含场景信息提取/推理/反思模块
2.1 环境信息提取模块
大语言模型中的提示词(prompt)对其生成输出的质量有着重要的影响。为了提高MLLM的生成质量,场景信息提取模块能够提取模块能够提取场景上下文信息,并将 其转换为鸟现图(BEV)图像和文本表示,使之与MLLM的输入保持一致。首先,本文将场景信息转化成鸟现图(BEV)图像,以增强MLLM对全局场景的理解能力。同时,需要对道路信息进行图表征,如图 2所示,在此基础上提取关键车辆辆运动信息,使MLLM能够够重点关注与自身位置最相关的区域。
其转换为鸟现图(BEV)图像和文本表示,使之与MLLM的输入保持一致。首先,本文将场景信息转化成鸟现图(BEV)图像,以增强MLLM对全局场景的理解能力。同时,需要对道路信息进行图表征,如图 2所示,在此基础上提取关键车辆辆运动信息,使MLLM能够够重点关注与自身位置最相关的区域。
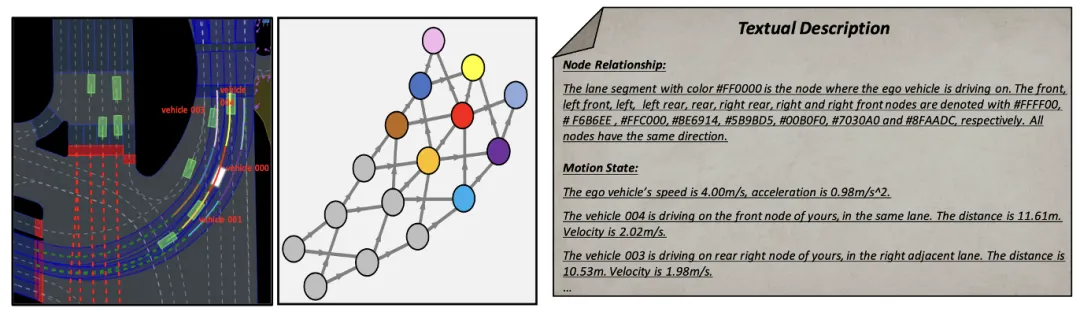
图2 基于图表征的文本提示描述
2.2 推理模块
如何将大语言模型的推理能力引入到自动驾驶规划过程中,实现具有常识推理能力的规划系统是一个关键问题。本文设计的方法能够以包含当前场景信息的用户消息和预定义的系统消息为输入,经过分层思维链多轮推理,生成智能驾驶员模型(IDM)的规划器代码。由此,PlanAgent能够通过上下文学习将MLLM强大的推理能力嵌入到自动驾驶规划任务中。
其中,用户消息包括BEV编码和基于图表征提取出来的周围车辆运动信息。系统消息包括任务的定义、常识知识以及思维链步骤,如图 3所示。
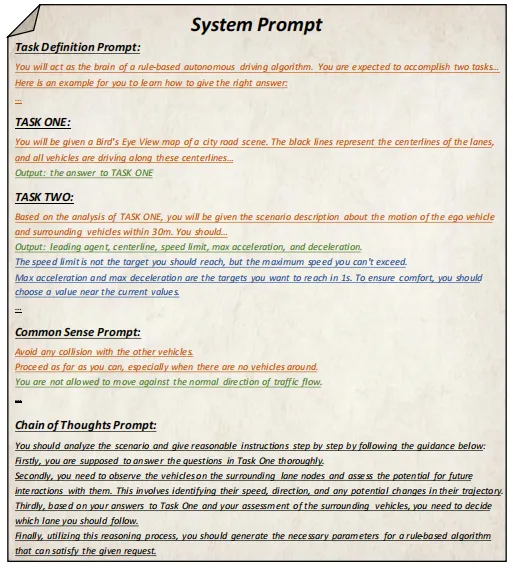
图3 系统提示模版
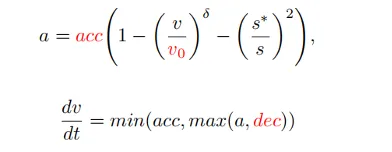
在得到prompt信息后,MLLM会对当前场景从三个层次进行推理:场景理解、运动指令和代码生成,最终生成规划器的代码。在PlanAgent中,会生成跟车、中心线、速度限制、最大加速度和最大减速度参数代码,再由IDM生成某一场景下的瞬时加速度,最终由此生成轨迹。

2.3 反思模块
通过以上两个模块强化了MLLM对场景的理解和推理能力。然而,MLLM的幻觉仍然对自动驾驶的安全构成了挑战。受到人类“三思而后行”决策的启发,本文在算法设计中加入了反思机制。对MLLM生成的规划器进行*模拟,并通过碰撞可能性、行驶距离、舒适度等指标评估该规划器的驾驶分数。当得分低于某个阈值τ时,表明MLLM生成的规划器欠妥,MLLM将被请求重新生成规划器。
3 实验与结果
本文在大规模真实场景的闭环规划平台nuPlan[4]进行闭环规划实验,以评估PlanAgent的性能,实验结果如下。
3.1 主要实验
表1 PlanAgent与其他算法在nuPlan的val14和test-hard基准上的比较
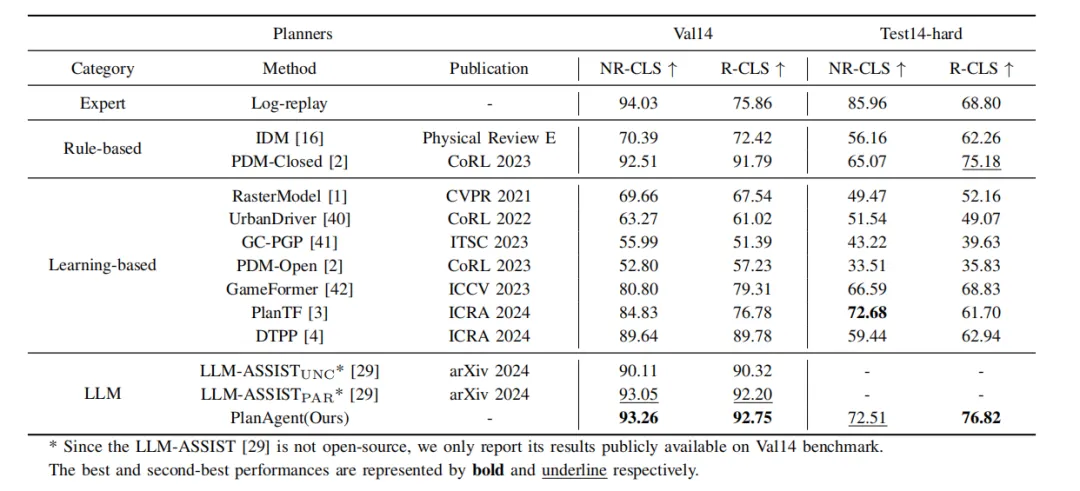
如表 1所示,本文将所提出的PlanAgent和三类最前沿的算法进行比较,并在nuPlan的两个基准val14和test-hard上进行测试。PlanAgent与其他方法相比表现出了有竞争力和可泛化的结果。
- 有竞争力的结果:在常见场景val14基准上,PlanAgent优于其他基于规则、基于学习和基于大语言模型的方法,在NR-CLS和R-CLS中都取得了最好的评分。
- 可泛化的结果:以PDM-Closed[1]为代表的规则类方法和以planTF[2]为代表的学习类方法都不能同时在val14和test-hard上表现良好。与这两类方法相比PlanAgent能够在克服长尾场景的同时,保证常见场景中的性能。
表2 不同方法描述场景所用token比较
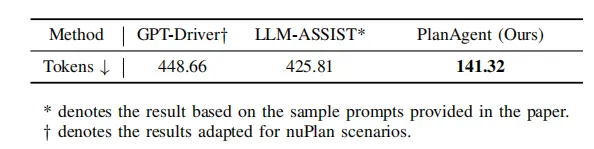
同时,PlanAgent相比于其他基于大模型的方法所用的token数量更少,如表 2,大概只需要GPT-Driver[5]或LLM-ASSIST[6]的1/3。这表明PlanAgent能够用较少的token更有效地对场景进行描述。这对于闭源大语言模型的使用尤为重要。
3.2 消融实验
表3 场景提取模块中不同部分的消融实验
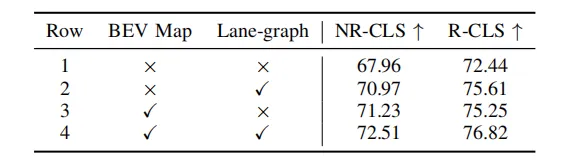
表4 分层思维链中不同部分的消融实验
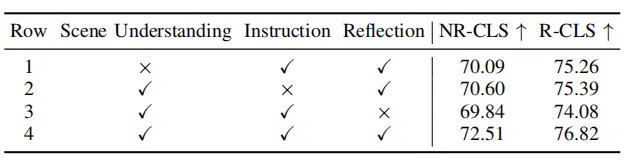
如表3和表4,本文对场景信息提取模块和推理模块中不同部分进行了消融实验,实验证明了各个模块的有效性和必要性。通过BEV图像和图表征两种形式可以增强MLLM对场景的理解能力,通过分层思维链能增强MLLM对场景的推理能力。
表5 PlanAgent在不同语言模型上的实验
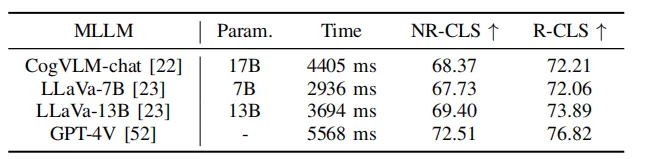
同时,如表 5所示,本文使用了一些开源大语言模型进行测试。实验结果表明,在Test-hard的NR-CLS基准上,PlanAgent使用不同的大语言模型分别能够比PDM-Closed的驾驶分数高出4.1%、5.1%和6.7%。这证明了PlanAgent与各种多模态大语言模型的兼容性。
3.3 可视化分析
环岛通行场景
PDM选择外侧车道作为centerline,车辆靠外侧车道行驶,在车辆汇入时卡住。PlanAgent判断有车辆汇入,输出合理的左换道指令,并生成横向动作选择环岛内侧车道为centerline,车辆靠内侧车道行驶。
路口停止线停车场景
PDM选择了红绿灯类为跟车类。PlanAgent输出合理指令,选择停止线为跟车类。
4 结论
本文提出了一种新的基于MLLM的自动驾驶闭环规划框架,称为PlanAgent。该方法引入了一个场景信息提取模块,用于提取BEV图像,并基于道路的图表征提取周围车辆的运动信息。同时提出了一个具有层次结构的推理模块,用于指导MLLM理解场景信息、生成运动指令,最终生成规划器代码。此外,PlanAgent还模仿人类决策进行反思,当轨迹评分低于阈值时进行重规划,以加强决策的安全性。基于多模态大模型的自动驾驶闭环规划智能体PlanAgent在nuPlan基准上取得了闭环规划SOTA性能。
以上就是迈向『闭环』| PlanAgent:基于MLLM的自动驾驶闭环规划新SOTA!的详细内容,更多请关注其它相关文章!
# 编辑器
# 何营销推广劣云速捷精选
# 内蒙古昌吉网站建设
# 朝阳外贸网站建设
# 鄂州网站建设排名优化
# 德江县seo关键词排名
# 网站公司宣传推广文案
# 商务类seo构思
# 布吉商城网站建设流程
# 网站建设需要哪些原则
# 黄浦区推广营销咨询热线
# 自动驾驶
# 首个
# 取得了
# 开源
# 如图
# 所需
# 提出了
# 多模
# 所示
# 智能驾驶
# 闭环
相关栏目:
【
行业资讯67740 】
【
技术百科0 】
【
网络运营39195 】
相关推荐:
如何用命令打开光驱
如何将系统移到固态硬盘
破太岁是什么意思
苹果16主打颜色有哪些
通配符的用法
导航power在汽车上是什么意思
mysql的datediff函数怎么用
爱奇艺会员qq登录可以几个人用?
税负是什么意思
苹果16有哪些bug
typescript参数怎么用
ao3镜像网站永久地址入口
今天是农历多少号
如何更新固态硬盘固件
华硕k20ce怎么装win7
没网环境如何安装typescript
春运抢票在哪儿抢票
夸克缺什么登录不了
win10系统如何打开cmd命令
如何学习typescript
折叠屏手机哪个有性价比
手机全功能type-c接口是什么意思
春运哪天抢票最好
j*a map数组怎么用
typescript怎么添加css样式
如何在固态硬盘上安装win7系统
课程伴侣电脑怎么登录
有什么基础可以学typescript
如何检测固态硬盘温度
typescript能干什么
市盈率3.2是什么意思
显示器power接口是什么意思
1kb等于多少字节
如何创建解压文件命令
bored是什么意思
如何设置sql命令
awful是什么意思
如何查看固态硬盘速度
typescript怎么解析vue TypeScript在vue中的使用最新解读
为什么用typescript
闲鱼上面的power是什么意思
三星 nfc什么功能是什么意思
如何更新typescript
折叠屏手机为什么没火
固态硬盘如何备份
个人征信不好如何恢复 个人征信不良的全面修复指南
怎么更新typescript
typescript怎么写react
壁挂炉power常亮是什么意思
如何判断固态硬盘
